Tires are the main responsible component for the vehicle-road interaction. To evaluate different tire designs and their influence on vehicle dynamic behavior, it is necessary to propose and validate accurate tire models. These models simulate tire behavior by reproducing the forces and torques acting on the tire. This research group has been working extensively in this field for years. Currently, we are focused on the development and implementation of the MF 6.2, PAC2002 and MC-MF tire models. Optimization procedures have been developed to adjust the parameters of the different models:
Related Proyects:
This research group has been working on the study of vehicle suspension systems. Among the work developed are studies to evaluate the condition of suspension systems and the proposal of novel damping systems.
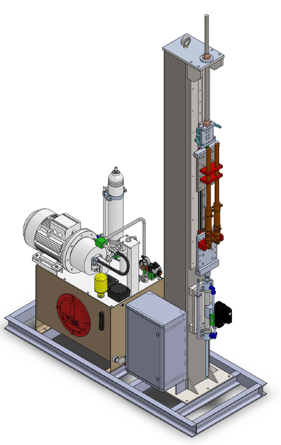
First, in this research, a novel methodology capable of obtaining the complete force–velocity characteristic curve of the shock absorber is pursued. The complete characteristic curve of a shock absorber is determined by means of an optimization method based on evolutionary algorithms. Real tests on a vehicle suspension test bench allowed for verifying the effectiveness of the proposed methodology.
A novel damping systems has been develoved based on the utilisation of a shear-thickening fluid as working fluid in a steering damper for motorcycles. Therefore, a prototype of a steering damper has been designed and then tested under different working conditions. Unlike conventional models, this new steering damper bases its performance on the combination of very simple rod geometries and a shear-thickening fluid of different concentrations. The experiments carried out with a test machine demonstrate that, despite its simplicity and reduced cost of manufacturing, the prototype shows similar behaviour to a conventional
Related Proyects:
The research group has developed vehicle dynamics models to reproduce vehicle behavior and to be used in parameter estimation algorithms, such as tire slippage, forces, velocities and accelerations.
Models have been developed for 2-wheel and 4-wheel vehicles as well as for vehicles powered by combustion engines and electric motors.
The developed models have been validated by comparison with other models and with real laboratory and track tests. These models have been used in the development of numerous active safety controls in vehicles.
Related Proyects:
Vehicle safety systems require complex control algorithms that have to be validated through simulations and track testing. We have developed braking, traction and steering controls for 4-wheel vehicles and traction and braking controls for motorcycles. In addition, we have also developed controllers that optimize braking and energy recovery in the case of electric vehicles.
The performance of these controllers has been evaluated by means of simulations, test benches and track tests. The group has test benches for the evaluation of tires, brakes, suspension and electrical systems performance. It also has 2 and 4-wheel sensorized vehicles for on-track testing.
Related Proyects:
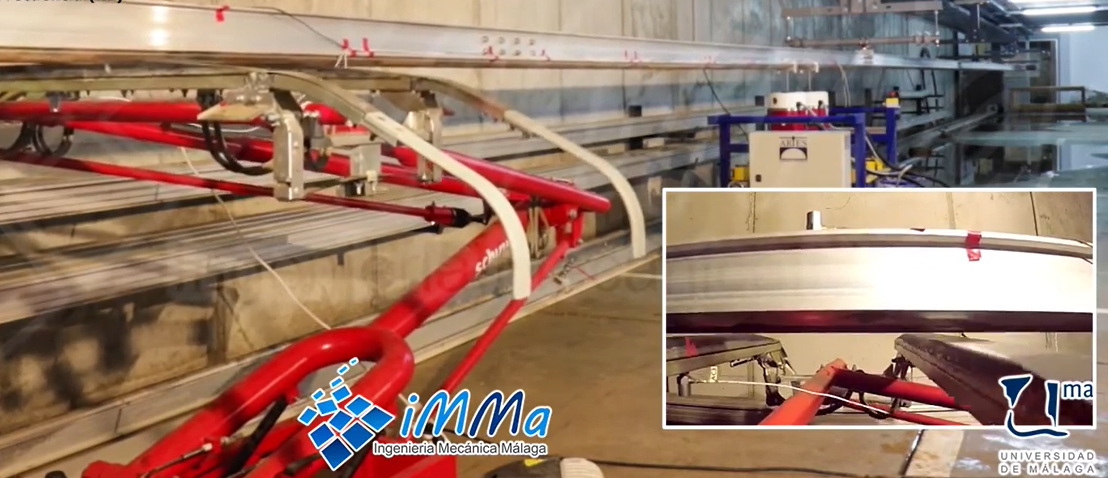
Electric rail transport has become a key agent in the decarbonization of transport, directly supporting Sustainable Development Goals (SDG) 9, 11 and 13. Our group work’s focuses on the energy collection system through rigid catenary in electric railway. Its main objective is to carry out scientific technical studies that allow for the improvement of this system, from design to operation and maintenance. The project relies on numerical modelling and experimental validation, involving measurements on a test bench and real lines. Main research lines include contact wire wear, estimation of contact forces in the wire-pantograph contact, optimal design of the facility and pantograph characterization.
Related Proyects:
Project Title: Safe and Efficient Driving System in Over-Actuated Autonomous Electric Vehicles using Bio-Inspired Algorithms
Dates: 02/12/2022- 31/12/2025
Summary:
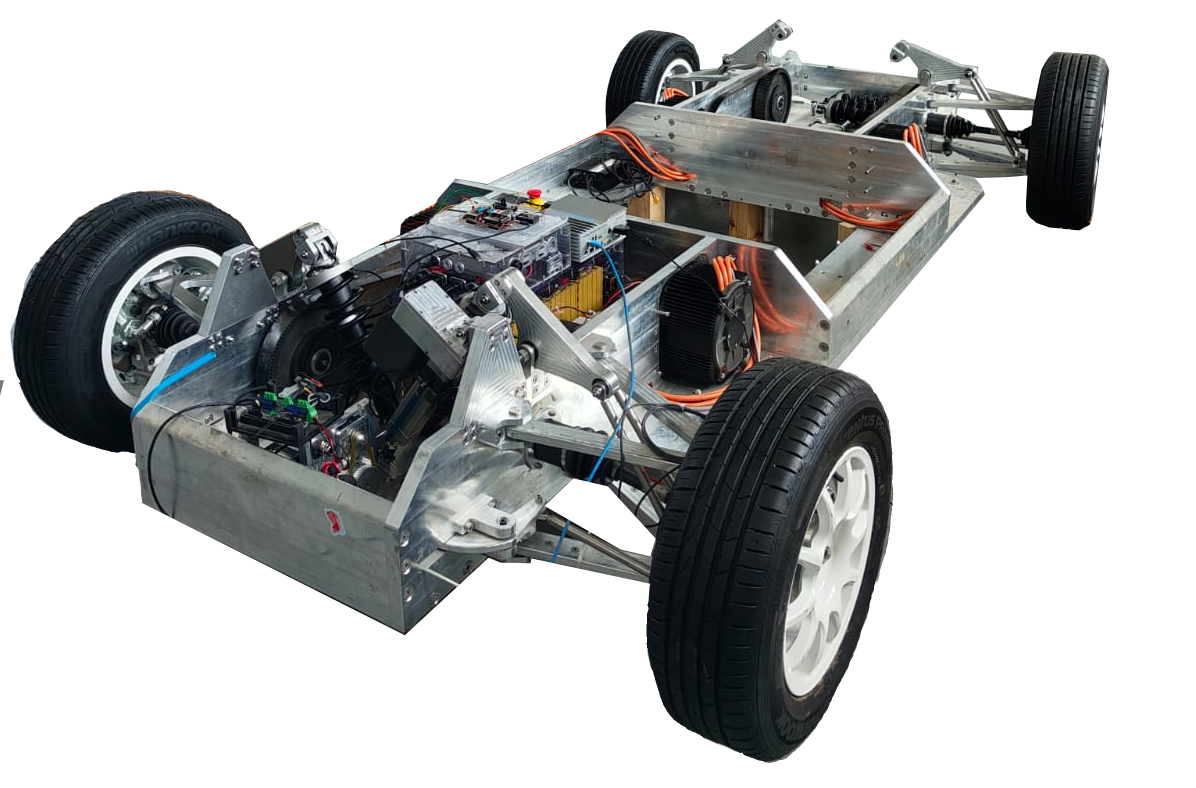
Electric vehicles (EV) are currently gaining worldwide popularity, being one of the key factors that will influence mobility and transportation of people and goods in the near future. This proposal aims to increase the level of autonomy in electric vehicles (EVs) while maintaining safety, making driving more efficient in all situations. The proposal is based on developing optimized control systems for torque vectoring (TV) and steering in over-actuated EVs. To extend vehicle autonomy, and thus the time without having to recharge the vehicle, EV incorporate solutions such as improved aerodynamics, low rolling resistance tires, regenerative braking and drive assistance systems. The research group has already conducted studies on tire rolling resistance and control algorithms for Regenerative Braking Systems (RBS). Another aspect that is currently receiving attention is the optimization of torque distribution in EVs equipped with 2 or more traction motors. Consequently, the main objective the project is to improve safety and efficiency while driving EVs. To this end, an over-actuated autonomous vehicle will be used to develop control algorithms based on the use of a new paradigm of neural networks. The goal is to minimize energy consumption in steering and traction maneuvers while improving vehicle safety by taking full advantage of the possibilities that over-actuated vehicles have.
Project Title: Design of an Adjustable Shock Absorber Using Non-Newtonian Fluids for Light Vehicles
Dates: 02/12/2022- 31/12/2025
Summary:
The suspension system of a vehicle is essential for both passenger comfort and safety. An inadequate choice or the degradation of the elements that make up the suspension can cause great instability in the vehicle, putting the safety of its occupants at serious risk. One of the fundamental elements for the proper functioning of the suspension system is the shock absorber. Although the basis of shock absorber technology has not undergone a radical change, its mechanical operating principle has been similar since the appearance of hydraulic shock absorbers, in recent times we have seen a great evolution thanks to the use of magnetorheological, electrorheological liquids or mechatronic systems. However, their high cost and the high energy consumption required for their operation make their use much less widespread. This project will delve into the application of a new technology based on non-Newtonian fluids that simplifies the operation of the damper and does not involve excessive cost in the development of suspension systems. What is relevant in this type of fluids is that the mechanical response depends on the action exerted on them, both in terms of duration and intensity. More specifically, we will make use of the variation of viscosity with shear rate and the viscoelastic response that these fluids present for this application. In this way, it will be possible to obtain dampers with a simpler design and that meet the requirements demanded of them.
Project Title: Neural Network-Based Road Type Identification Method For Electric Vehicles
Dates: 01/06/2020 - 31/05/2023
Summary:
The appearance of vehicle active safety systems such as ABS, TCS, ESP has improved road safety and reduced the risk of suffering an accident. These systems safeguard us, being in continuous evolution and incorporating new capabilities continuously. To do so, they resort to advanced and complex new control algorithms and brake system architectures. These systems need to measure and/or estimate certain parameters to work properly. Among these parameters, the road type on which the vehicle circulates is of fundamental importance. Knowing the road type allows active safety systems to anticipate and gain the time needed to prepare for the existence of a risk, thereby optimizing wheel slip and improving the braking distance and maneuverability of vehicles. This project is presented to cope with the problem stated before. This proposal seeks to develop a methodology that allows knowing the characteristics of the surface on which the vehicle circulates continuously and thus the adherence in the tire-road contact. In order to do this, a new paradigm within artificial intelligence will be used: Spiking Neural Networks (SNN). A fundamental part of the project will focus on the development of the appropriate architecture and learning method of the network to ensure its adaptation to any driving situation. The main difficulty for the continuous estimation of the road type lies in situations where the wheel slip is low or very low. Therefore, two learning strategies of the road type will be carried out in this project depending on the degree of slip measured in the wheels. On one hand, the measure provided by a contact sensor will determine the friction coefficient between tire and road. This measurement will be used for the learning of the network when the state of the vehicle produces a very small slip between the wheels and the road. Secondly, when the wheel slip is large enough, the learning process will be carried out by comparing the network output with a measurement obtained by a sensorized rim. These learning strategies will cooperate to provide safety systems with a reliable and robust surface type estimate. Thanks to this information, vehicle control systems can perform more adequately and quickly in dangerous situations, gaining a substantial advantage over current systems.
Project Title: Regenerative braking system based on bio-inspired algorithms
Dates: 15/11/2019 - 15/11/2021
Summary:
The aim of this project is to deepen in relevant aspects that affect the safety of the occupants of electric vehicles, as well as to improve their autonomy. For this reason, a regenerative braking system will be developed that uses all the necessary information to achieve, on the one hand, an increase in vehicle autonomy by increasing the capacity to regenerate energy and, on the other hand, to increase safety in braking processes. To achieve this objective, we propose to develop parameter estimation and control algorithms based on bio-inspired systems. The former will mainly provide two fundamental magnitudes for the optimal operation of the control algorithms, the vehicle speed and the adhesion conditions in the tire-road contact. The latter will seek to optimize the performance of the braking system, improving occupant safety and increasing energy regeneration rates. To this end, artificial intelligence techniques will be used, mainly through impulse neural networks (SNN).
Project Title: Real time estimation of tire-road friction characteristics using bio-inspired algorithms to improve vehicle active safety
Dates: 01/01/2015 - 31/12/2018
Summary:
The appearance of active safety systems such as ABS, TCS, ESP, etc., has been a major evolution in road safety. In the automotive sector, the term vehicle active safety systems refers to those whose goal is to help avoid a crash or to reduce the risk of having an accident. These systems safeguard us, being in continuous evolution and incorporating new capabilities continuously. Recently, there have been a series of prototypes of autonomous and semi-autonomous vehicles that attempt to mimic human capabilities such as handling and control. They have created high expectations, leading to a change of our vision in future transport-by-land vehicles. All these vehicles perceive the environment and interpret the information obtained to activate different systems, such as brakes, throttle and steering.
In order for these systems and vehicles to work adequately, they need to know some fundamental information, which is the type of road they circulate on. This project is proposed for this reason. With this project, we try to detect the type of road where the vehicle is being driven on by means of estimation techniques of the forces of contact between the wheel and road and the speed of the vehicle. This early road detection is intended to allow vehicle control systems to act faster and more suitably before in the cased of risk situations taking place, obtaining a substantial advantage with it compared to current systems.
Vehicle models will be programmed in on-board systems to perform real-time estimations. Besides this, the influence of various parameters such as inflation pressure, tire type, temperature and so on in detecting the type of road, will be evaluated. To achieve this goal, we will carry out a series of tests using a tire-test bench to obtain information about the adhesion curves characteristics. A spiking neural network will be developed considering the influence of these parameters. Those parameters will be the input to the neural network. The output a will be the type of road where the vehicle is moving on at any time. Proposed Artificial Neural Networks process information in a similar way to biological neural networks. The processing of this information and activation of the signals that control systems is much faster. Moreover, these networks also have the ability to learn.
Project Title:Development of an advanced traction and braking control system for motorcycles
Dates: 01/01/2012 – 31/12/2014
Summary:
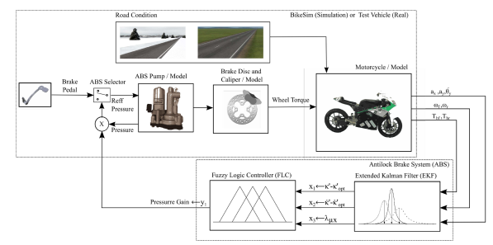
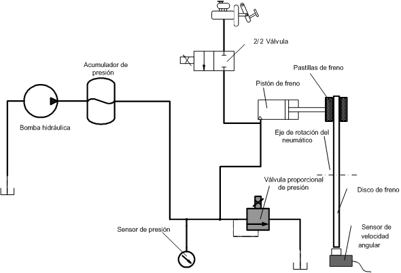
This project aims to develop and implement a new control model of the braking system and the traction system in a motorcycle, with the objective of improving braking efficiency, as well as controlling slippage in traction, in order to achieve an improvement in the dynamic behavior and safety of two-wheeled vehicles. Bench and track tests are proposed to validate the proposed models. These tests will make it possible to evaluate and assess the effectiveness of these models and their architecture, as well as to make comparisons with commercial ABS and TCS systems.
The key feature of the new braking and traction model is the use of the fuzzy logic technique and other optimized algorithms for the determination by means of prediction techniques of the parameters on the basis of which the anti-lock braking and anti-skid system should operate (e.g. slip, speed, vertical load or type of road). A new brake system architecture is also proposed based on the use of servo valves, which allow a continuous control of the braking pressure, thus improving control and avoiding the typical fluctuations of the all-clear valves traditionally used in commercial ABS systems.
Project Title:Detection of irregular wear areas in rigid catenary systems in the Málaga metro and their reduction based on wear models validated with tunnel records
Dates: 02/12/2022- 31/12/2025
Summary:
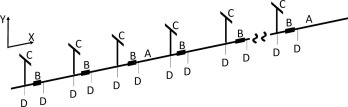
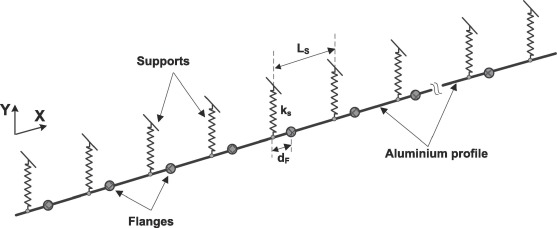
This project aims to build on the progress already made by this research group. We currently have a validated rigid catenary model that is capable of calculating numerous cases in a short time thanks to its high computational efficiency, providing reliable and representative results. This model has enabled us to study this type of installation, leading to relevant publications in this field. We want to enhance this model by complementing it with a detailed pantograph model and a wear model resulting from the interaction between them. This expansion of the model is a significant innovation, as more and more authors believe that simulations should cover at least the frequency range from 0 to 100 Hz, an aspect that the research group proposes to incorporate into this project. This improvement will make it possible to calculate the contact forces and wear on the rigid catenary with a greater level of detail and accuracy than in previous studies, which, in the best of cases, have considered the range from 0 to 20 Hz.
Project Title:Wear prediction in rigid catenary with experimental validation on track
Dates: 01/01/2025- 31/12/2027
Summary:
The aim is to improve the operation of the rigid catenary by increasing the maximum circulation speed in safe conditions, while maintaining the statistical parameters of the contact force within the limits established by regulations. The project will carry out studies to assess how the geometric design and installation errors in the catenary affect the current collection quality. These studies can serve in the future as a basis for properly defining technical specifications of new catenary installations. The UPV group has experience in participating in an international flexible catenary benchmark that has subsequently been used, among other studies, to define the EN 50318 (2018) standard. With the same objective of increasing circulation speed, the UPV's HiL test bench will be used to test an active control system on real pantographs. The project will also provide tools that allow the infrastructure manager to make the most convenient decisions for the optimal functioning of the pantograph-catenary system. Specifically, experimentally validated procedures will be developed to predict wear. Achieving a reduction in wear on the contact wire and increasing the speed of circulation in rigid catenary means extending the use of these railway power supply systems and promoting more efficient, and competitive infrastructures